Théorie de deux réactions a été proposé par Andre Blondel. La théorie propose de résoudre les MMF en armature donnés en deux composants mutuellement perpendiculaires, avec un le long de l’axe du rotor du pôle saillant. Il est connu comme le axe direct ou axe d composant. L’autre composant est situé perpendiculaire à l’axe du poteau saillant du rotor. Il est connu comme le axe quadrature ou axe Q composant.
Le composant de l’axe d du mmf d’armature, fun est indiqué par fd, et la composante de l’axe Q par fq. Le composant fd est de magnétisation ou de démagnétisation. Le composant fq se traduit par un effet croisé. Si ψ est l’angle entre le courant d’armature iun et la tension d’excitation ef et fun est l’amplitude du MMF d’armature, alors
Machine synchrone à pôle saillant deux théorie de la rection
Dans la machine synchrone du rotor cylindrique, l’espace d’air est uniforme. La structure du poteau du rotor d’une machine à poteaux saillants rend l’espace d’air très non uniforme. Considérons un rotor de poteau à 2 pôles et saillant tournant dans le sens antihoraire dans un stator à 2 pôles comme indiqué sur la figure ci-dessous:
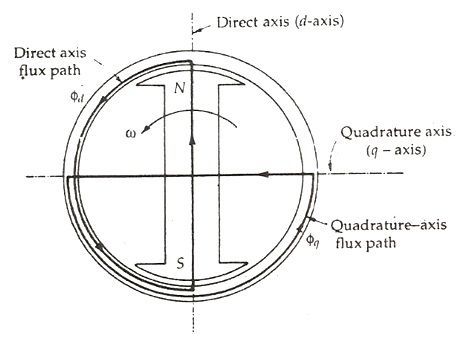 L’axe le long de l’axe du rotor est appelé l’axe direct ou D. L’axe perpendiculaire à l’axe D est connu sous le nom de quadrature ou axe Q. Le chemin de flux de l’axe direct implique deux petits espaces d’air et est le chemin de la réticence minimale. Le chemin illustré dans la figure ci-dessus par ϕq A deux grandes lacunes d’air et est le chemin de la réticence maximale.
L’axe le long de l’axe du rotor est appelé l’axe direct ou D. L’axe perpendiculaire à l’axe D est connu sous le nom de quadrature ou axe Q. Le chemin de flux de l’axe direct implique deux petits espaces d’air et est le chemin de la réticence minimale. Le chemin illustré dans la figure ci-dessus par ϕq A deux grandes lacunes d’air et est le chemin de la réticence maximale.
Le flux de rotor bR est montré verticalement vers le haut comme indiqué dans la figure ci-dessous:
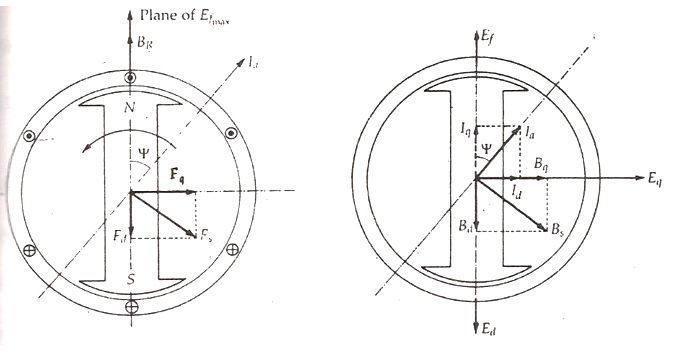 Le flux de rotor induit une tension ef dans le stator. Le courant d’armature du stator iun Va circuler dans le moteur synchrone lorsqu’une charge de facteur de puissance en retard y est connectée. Ce courant d’armature stator iun est en retard sur la tension générée Ef par un angle ψ.
Le flux de rotor induit une tension ef dans le stator. Le courant d’armature du stator iun Va circuler dans le moteur synchrone lorsqu’une charge de facteur de puissance en retard y est connectée. Ce courant d’armature stator iun est en retard sur la tension générée Ef par un angle ψ.
Le courant d’inhabituel produit la force magnétomotive du stator fs. Ce MMF est en retard de moiun par angle de 90 degrés. Le MMF FS produit le champ magnétique du stator bS long la direction de FS. Le stator MMF est résolu en deux composants, à savoir le composant de l’axe direct Fd et le composant de l’axe quadrature Fq.
Si,
- ϕd est le flux de l’axe direct
- Φq est le flux de l’axe quadrature
- Rd est la réticence du chemin de flux de l’axe direct
Donc
Comme, rd
Laisser,
- Eannonce être le composant de l’axe direct de la tension de réaction de l’armature.
- Eaq être le composant de l’axe quadrature de la tension de réaction de l’armature.
Étant donné que chaque tension de réaction d’armature est directement proportionnelle à son courant de stator et est en retard par des angles de 90 degrés. Par conséquent, les tensions de réaction d’armature peuvent être écrites comme indiqué ci-dessous:
Où,
- Xannonce est la réactance de réaction d’armature dans l’axe direct par phase.
- Xaq est la réactance de réaction d’armature dans l’axe quadrature par phase.
La valeur de xannonce est toujours plus grand que xaq. Comme l’EMF induit par un MMF donné agissant sur l’axe direct est plus petit que pour l’axe en quadrature en raison de sa réticence plus élevée.
La tension totale induite dans le stator est la somme d’EMF induite par l’excitation de champ. Les équations sont écrites comme suit:
La tension e ‘est égale à la somme de la tension du borne V et des chutes de tension dans la résistance et la réactance des fuites de l’armature. L’équation est écrite comme:
Le courant d’armature est divisé en deux composants; L’un est la phase avec la tension d’excitation Ef et l’autre est en quadrature de phase.
Si
- jeq est la composante de l’axe de iun en phase avec ef.
- jed est l’axe d iun En retard Ef par 90 degrés.
Donc,![]()
Combinant l’équation (4) et (5) nous obtenons,
Combinant l’équation (6) et (7) nous obtenons, Laisser,
Laisser,
La réactance Xd est appelé le réactance synchrone de l’axe directet la réactance Xq est appelé le Réactance synchrone de l’axe quadrature.
En combinant les équations (9) (10) et (11), nous obtenons les équations ci-dessous: L’équation (12) illustrée ci-dessus est l’équation de tension finale pour un générateur synchrone saillant.
L’équation (12) illustrée ci-dessus est l’équation de tension finale pour un générateur synchrone saillant.