Définition: Le système d’entraînement électrique est défini comme le système qui est utilisé pour contrôler la vitesse, le couple et la direction d’un moteur électrique. Chaque système d’entraînement électrique est différent des autres systèmes d’entraînement électrique, mais il existe certaines caractéristiques communes associées à tous les systèmes d’entraînement électrique.
Systèmes d’entraînement électrique
La figure ci-dessous représente la disposition typique d’un réseau de distribution de puissance au niveau de l’usine. Ce système d’entraînement électrique reçoit son alimentation CA entrante à partir d’un centre de contrôle du moteur (MCC). MCC contrôle la puissance à quelques disques situés dans une zone.
Dans une grande usine de fabrication, beaucoup de ces MCC existent et ils reçoivent de l’énergie du centre de distribution principal appelé Power Control Center (PCC). Le MCC et le PCC ont normalement utilisé le disjoncteur d’air comme élément de commutation d’alimentation. Les notes de ces éléments de commutation sont jusqu’à 800 V et 6400A.

Les relais de surcharge thermique protègent la surcharge dans le système d’entraînement électrique. La protection de court-circuit est fournie par le mécanisme de détection magnétique du disjoncteur. Les fusibles de capacité de rupture élevée sont utilisés pour la protection de la sauvegarde ainsi que pour fournir la protection contre le défaut se produisant dans la section de la barre de bus avant le disjoncteur.
Considéré comme l’exemple de deux systèmes d’entraînement. On utilise un moteur à courant continu contrôlé par le convertisseur et un autre moteur AC nourri à l’onduleur. Le système d’entraînement du moteur CC contrôlé par le convertisseur est illustré dans la figure ci-dessous.

L’entraînement du moteur à induction contrôlé par onduleur GTO est illustré dans la figure ci-dessous:
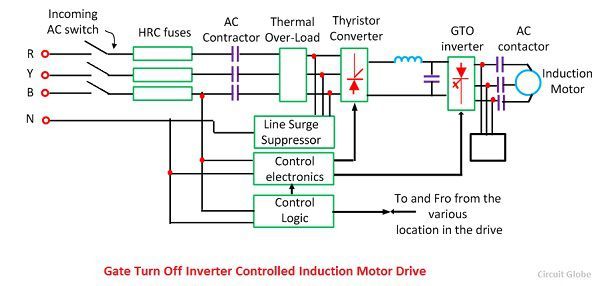
Voici les principales parties de ces systèmes d’entraînement:
- Commutateur AC entrant.
- Convertisseur de puissance et assemblage de l’onduleur.
- Appareillage de commutation DC et CA sortant
- Logique de contrôle
- Moteur et la charge associée.
Les principales parties du système d’alimentation électrique sont expliquées ci-dessous.
1. Appareillage AC entrant: Il se compose d’une unité de fusibles de commutation et d’un entrepreneur en courant alternatif qui a des variétés allant jusqu’à 660 V, 800A.Le engin de commutateur remplace l’entrepreneur normal par l’entrepreneur monté sur la barre et a également utilisé le disjoncteur de circuit aérien comme interrupteur entrant. L’entrepreneur monté sur la barre augmente la plage vers le haut de la plage à 1000v, 1200a.
Il utilise le fusible HRC dont la notation est jusqu’à 660 V, 800A. L’appareillant AC se compose de surcharge thermique pour protéger le système contre la surcharge. Parfois, l’entrepreneur de l’appareillage de commutation est remplacé par le disjoncteur de boîtier moulé.
2. Convertisseur d’alimentation / ou invertisseur – Cet assemblage a deux blocs majeurs: l’électronique de puissance et de contrôle. Les blocs d’électronique de puissance sont constitués de dispositifs semi-conducteurs, de dissipateurs thermiques, de fusibles semi-conducteurs, de suppresseurs de surtension, de ventilateurs de refroidissement. L’électronique de contrôle consiste en un circuit de déclenchement, sa propre alimentation réglementée et la conduite et le circuit d’isolement. Le circuit de conduite et d’isolement contrôle et régule le flux de puissance vers le moteur.
Lorsque le lecteur fonctionne dans une boucle fermée, il aura un contrôleur et des boucles de rétroaction de courant et de vitesse. Le système de contrôle a une isolation de trois ports, c’est-à-dire l’alimentation, les entrées et les sorties qui sont isolées avec des niveaux d’isolation adéquats.
3. Suppresseurs de surtension de ligne – Il protège le convertisseur semi-conducteur contre les pointes de tension produites dans la ligne en raison des commutations ON et désactivées de la charge se connectant sur la même ligne. Le suppresseur de surtension de ligne ainsi que l’inductance suppriment les pointes de tension.
Le suppresseur de surtension de ligne absorbe une certaine quantité d’énergie piégée lorsque le disjoncteur entrant fonctionne et brise le courant fourni au piège. Le suppresseur de surtension de ligne ne sera pas nécessaire lorsque le modulateur de puissance n’est pas un semi-conducteur.
4. Logique de contrôle – Il est utilisé pour le verrouillage et le séquençage de diverses opérations du système d’entraînement dans une condition normale, de défaut et d’urgence. L’emboîtement protège le système contre les opérations anormales et dangereuses. Le séquençage protège les différentes opérations d’entraînement, telles que le démarrage, le freinage, l’inversion, le jogging, etc., qui sont effectuées dans une séquence pré-planifiée. Pour les opérations complexes de verrouillage et de séquence, le contrôleur logique programmable est utilisé.