Servomoteur sont également appelés moteurs de contrôle. Ils sont utilisés dans les systèmes de contrôle de rétroaction comme actionneurs de sortie et n’utilisent pas pour la conversion d’énergie continue. Le principe du servomoteur est similaire à celui de l’autre moteur électromagnétique, mais la construction et l’opération sont différentes. Leur cote de puissance varie d’une fraction d’un watt à quelques centaines de watts.
L’inertie du rotor des moteurs est faible et a une vitesse de réponse élevée. Le rotor du moteur a une longue longueur et un diamètre plus petit. Ils fonctionnent à très basse vitesse et parfois même à zéro vitesse. Le servomoteur est largement utilisé dans le radar et les ordinateurs, les robots, les machines-outils, les systèmes de suivi et de guidage, le contrôle du traitement, etc.
Applications du servomoteur
La puissance de la puissance du servomoteur peut varier de la fraction des watts à quelques centaines de watts. Le rotor du servomoteur a une faible résistance à l’inertie, et donc ils ont une vitesse d’inertie élevée. Les applications du servomoteur sont les suivantes:
- Ils sont utilisés dans les systèmes radar et les contrôleurs de processus.
- Les servomoteurs sont utilisés dans les ordinateurs et la robotique.
- Ils sont également utilisés dans les machines-outils.
- Systèmes de suivi et d’orientation.
Classification du servomoteur
Ils sont classés comme servomoteurs AC et CC. Le servomoteur AC est divisé en deux types:
- Servomoteur à courant alternatif
- Servomoteur AC en trois phases
 Motor DC
Motor DC
 Motor DC
Motor DCLes servomoteurs DC sont des moteurs CC excités séparément ou des moteurs à courant continu de l’aimant permanent. La figure (a) montre la connexion du servomoteur à courant continu excité séparément et la figure (b) montre le MMF d’armature et le champ d’excitation MMF en quadrature dans une machine DC.
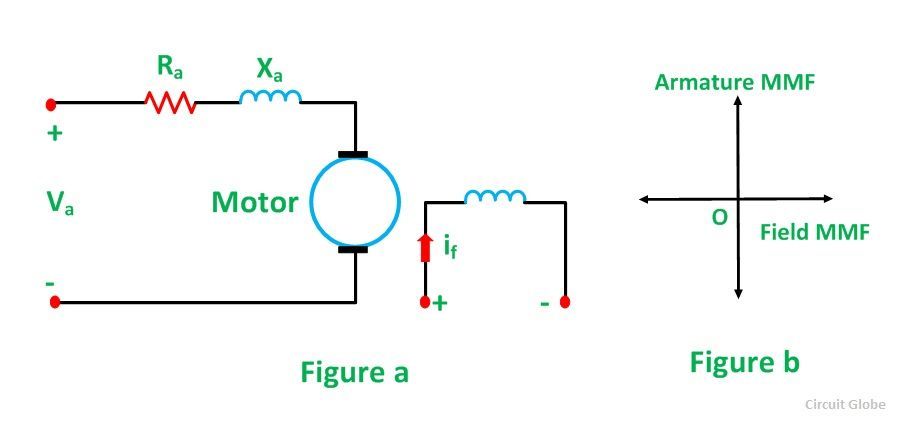
Cela fournit une réponse de couple rapide car le couple et le flux sont découplés. Par conséquent, un petit changement dans la tension ou le courant d’armature entraîne un décalage significatif de la position ou de la vitesse du rotor. La plupart des servomoteurs de haute puissance sont principalement DC.
Les caractéristiques de la vitesse du couple du moteur sont présentées ci-dessous:
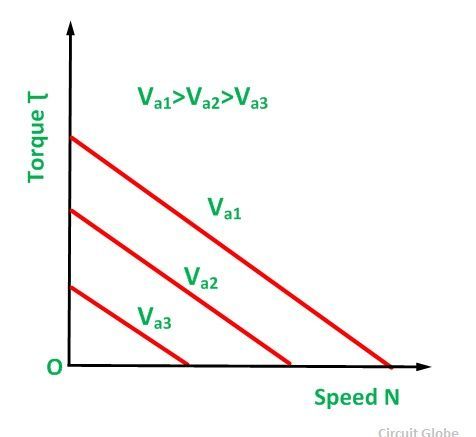
À partir des caractéristiques ci-dessus, on voit que la pente est négative. Ainsi, une pente négative fournit un amortissement visqueux pour le système de conduite servo.
Servomoteur AC
Les servomoteurs AC sont divisés en deux servomoteurs AC à deux phases. La plupart des servomoteurs AC sont du type de moteur à induction à cage d’écureuil biphasé. Ils sont utilisés pour les applications de faible puissance. Le moteur à induction à cage d’écureuil triphasé est désormais utilisé pour les applications où un système à haute puissance est requis.