Le Moteur à phase divisée est également connu sous le nom de Moteur de démarrage à résistance. Il possède un rotor à cage unique et son stator comporte deux enroulements appelés enroulement principal et enroulement de démarrage. Les deux enroulements sont déplacés de 90 degrés dans l’espace. L’enroulement principal a une très faible résistance et une réactance inductive élevée, tandis que l’enroulement de démarrage a une résistance élevée et une faible réactance inductive. Le schéma de connexion du moteur est présenté ci-dessous :
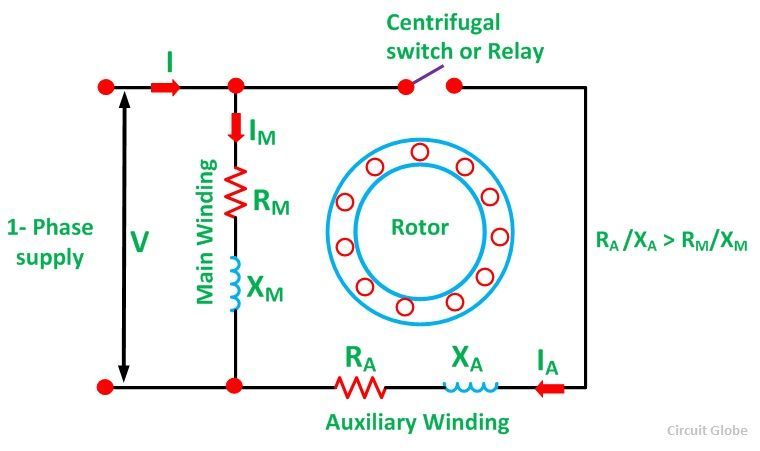 Une résistance est connectée en série avec l’enroulement auxiliaire. Le courant dans les deux enroulements n’est donc pas égal, le champ tournant n’est pas uniforme. Le couple de démarrage est donc faible, de l’ordre de 1,5 à 2 fois le couple de fonctionnement indiqué. Au démarrage du moteur, les deux enroulements sont connectés en parallèle.
Une résistance est connectée en série avec l’enroulement auxiliaire. Le courant dans les deux enroulements n’est donc pas égal, le champ tournant n’est pas uniforme. Le couple de démarrage est donc faible, de l’ordre de 1,5 à 2 fois le couple de fonctionnement indiqué. Au démarrage du moteur, les deux enroulements sont connectés en parallèle.
Dès que le moteur atteint la vitesse d’environ 70 à 80 % de la vitesse synchrone, l’enroulement de démarrage est automatiquement déconnecté du réseau d’alimentation. Si les moteurs ont une puissance nominale d’environ 100 watts ou plus, un interrupteur centrifuge est utilisé pour déconnecter l’enroulement de démarrage et pour les moteurs de plus petite puissance, un relais est utilisé pour la déconnexion de l’enroulement.
Un relais est connecté en série avec l’enroulement principal. Au démarrage, un courant important circule dans le circuit et le contact du relais se ferme. Ainsi, l’enroulement de démarrage est dans le circuit et, à mesure que le moteur atteint la vitesse prédéterminée, le courant dans le relais commence à diminuer. Par conséquent, le relais ouvre et déconnecte l’enroulement auxiliaire de l’alimentation, faisant fonctionner le moteur uniquement sur l’enroulement principal.
Le diagramme de phase du moteur à induction à phase divisée est présenté ci-dessous :
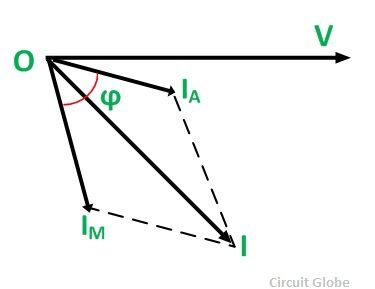 Le courant dans l’enroulement principal (IM.) est en retard sur la tension d’alimentation V presque d’un angle de 90 degrés. Le courant dans l’enroulement auxiliaire IUN est approximativement en phase avec la tension secteur. Il existe donc une différence de temps entre les courants des deux enroulements. La différence de phase temporelle ϕ n’est pas de 90 degrés, mais de l’ordre de 30 degrés. Cette différence de phase est suffisante pour produire un champ magnétique tournant.
Le courant dans l’enroulement principal (IM.) est en retard sur la tension d’alimentation V presque d’un angle de 90 degrés. Le courant dans l’enroulement auxiliaire IUN est approximativement en phase avec la tension secteur. Il existe donc une différence de temps entre les courants des deux enroulements. La différence de phase temporelle ϕ n’est pas de 90 degrés, mais de l’ordre de 30 degrés. Cette différence de phase est suffisante pour produire un champ magnétique tournant.
Le Caractéristique de vitesse de couple du moteur à phase divisée est illustré ci-dessous :
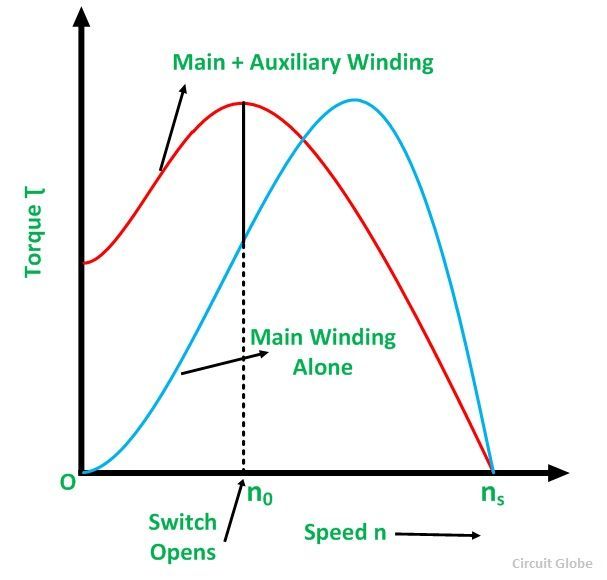
Ici, n0 est le point auquel l’interrupteur centrifuge fonctionne. Le couple de démarrage du moteur de démarrage à résistance est d’environ 1,5 fois le couple à pleine charge. Le couple maximum est d’environ 2,5 fois le couple à pleine charge à environ 75 % de la vitesse synchrone. Le courant de démarrage du moteur est élevé, environ 7 à 8 fois la valeur à pleine charge.
Le sens du moteur de démarrage par résistance peut être inversé en inversant la connexion de ligne de l’enroulement principal ou de l’enroulement de démarrage. L’inversion du moteur n’est possible qu’à l’arrêt.
Applications du moteur à induction à phase divisée
Ce type de moteur est bon marché et convient au démarrage facile de charges où la fréquence de démarrage est limitée. Ce type de moteur n’est pas utilisé pour les entraînements nécessitant plus de 1 KW en raison du faible couple de démarrage. Les différentes applications sont les suivantes :
- Utilisé dans la machine à laver et les ventilateurs de climatisation.
- Les moteurs sont utilisés dans les broyeurs mélangeurs et les cireuses de sol.
- Soufflantes, pompes centrifuges.
- Perceuse et tour.
Il s’agit d’un moteur à induction à phase divisée.