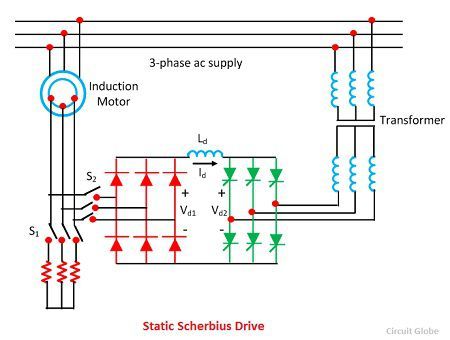
Le lecteur de Scherbius statique fournit le contrôle de vitesse d’un moteur de rotor de plaie sous la vitesse synchrone. La partie de la puissance AC du rotor est convertie en CC par un pont à diode. Le redresseur contrôlé fonctionne comme un onduleur et convertit la puissance DC en AC et la renvoie à la source CA. Ce disque a la capacité de couler la puissance à la fois dans la direction positive et négative de la tension injectée. Cela augmente l’état de fonctionnement du lecteur.
La puissance de rétroaction est contrôlée en contrôlant le comptoir de l’onduleur EMF Vd2qui est contrôlé en contrôlant l’angle de tir de l’onduleur.d. La puissance de glissement du lecteur est renvoyée à la source en raison de laquelle l’efficacité du lecteur augmente.
La puissance d’entrée du lecteur est la différence de la puissance d’entrée CC et de la puissance retirée. La puissance d’entrée réactive est la somme du moteur et de l’entrée puissance réactive.
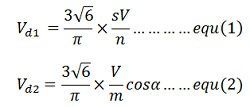 Où α est l’angle de tir de l’onduleur et n, et m sont respectivement le stator au rapport de virage du rotor du rapport moteur et côté source pour convertir le rapport de virage latéral du transformateur. La négligence tombe à travers l’inductance.
Où α est l’angle de tir de l’onduleur et n, et m sont respectivement le stator au rapport de virage du rotor du rapport moteur et côté source pour convertir le rapport de virage latéral du transformateur. La négligence tombe à travers l’inductance.
![]()
Substituant l’équation (1) et (2) dans l’équation ci-dessus, nous obtenons
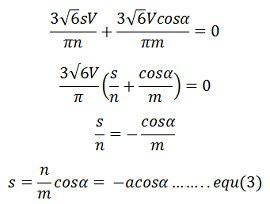
où a = n / m
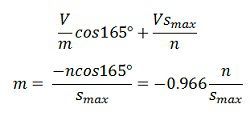
La valeur maximale de l’alpha est limitée à 165 ° pour une commutation sûre du thyristor de l’onduleur. Le glissement peut être contrôlé de 0 à 0,966α lorsque α est passé de 90 ° à 165 °. La plage de vitesse appropriée peut être obtenue en choisissant la valeur appropriée de α.
Le transformateur est utilisé pour correspondre à la tension de vd1 et Vd2. À la vitesse la plus basse requise du lecteur, Vd1 aura la valeur maximale Vd1met il est donné par
![]()
Où sm est la valeur du glissement à la vitesse la plus basse. Si α est limité à 165, m est choisi de telle sorte que la tension de l’onduleur ait une valeur Vd1m Lorsque α est 165 °, c’est-à-dire,
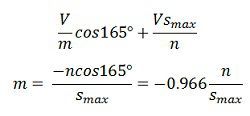
La valeur de M détermine l’angle de tir le plus élevé à la vitesse du moteur inférieur. Il donne également l’angle de tir le plus élevé et la puissance réactive la plus basse à la vitesse la plus basse.
Considéré comme le circuit du moteur, qui néglige la branche de magnétisation. Lorsqu’il est référé à DC Link, résistance (SRs + Rr) sera 2 (sr ‘s + Rr). Cela donne le circuit équivalent du lecteur, où Vd1 et Vd2 sont donnés. Rd est la résistance de l’inductance de liaison DC.
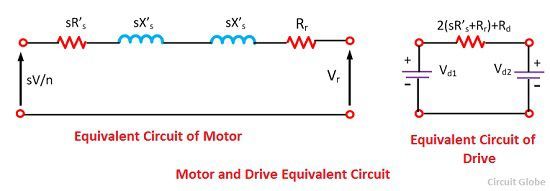
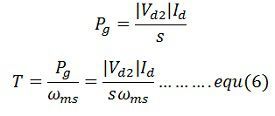
Si la perte de cuivre du rotor est négligée
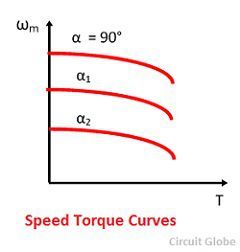
La nature de la courbe de couple de vitesse est illustrée à la figure ci-dessous.
Le lecteur a une application dans le lecteur de pompe qui nécessite le contrôle de vitesse dans la plage étroite uniquement. Le lecteur est largement utilisé dans les ventilateurs et les entraînements de pompe moyens et élevés, en raison de l’efficacité élevée et du faible coût.
Modes de fonctionnement des entraînements de Scherbius statiques
Voici les modes de fonctionnement des entraînements statiques de Scherbius.
Automobile sous-synchrone – Dans ce mode de fonctionnement, le glissement et le couple sont tous les deux positifs et donc la tension injectée est en phase avec le courant du rotor. La puissance s’écoule dans le stator et la rétroaction dans le circuit du rotor.
Motorance super synchrone – Lorsque la vitesse du moteur est au-dessus de la vitesse synchrone, le glissement est négatif. Ainsi, la tension et le courant sont hors de phase les uns avec les autres. La puissance alimente le rotor du circuit d’entraînement ainsi que la puissance d’entrée s’écoulant dans le stator.
Génération sous-synchrone – Pour la vitesse sous-synchrone, le couple doit être positif, bien que le glissement soit positif. La puissance est introduite dans le rotor à travers l’anneau de glissement.
Génération super synchrone – Lorsque la vitesse du moteur au-dessus de la vitesse synchrone, le glissement et le couple deviennent négatifs. Ainsi, la tension d’injection est en phase avec le rotor. La puissance mécanique est injectée par l’arbre et la puissance de sortie est obtenue à partir du stator et du circuit du rotor.