Le principe de Moteur pas à pas de réticence variable est basé sur la propriété des lignes de flux qui capturent le chemin de réticence faible. Le stator et le rotor du moteur sont alignés de telle sorte que la réticence magnétique soit minimale. Il existe deux types de moteur pas à pas de réticence variable. Ils sont les suivants:
Fonctionnement d’un moteur pas à pas de réticence variable
Un moteur pas à pas en quatre phases ou (4/2 pôles), une seule pile, est illustré ci-dessous. Ici, (4/2 pôles) signifie que le stator a quatre pôles et que le rotor a deux pôles.
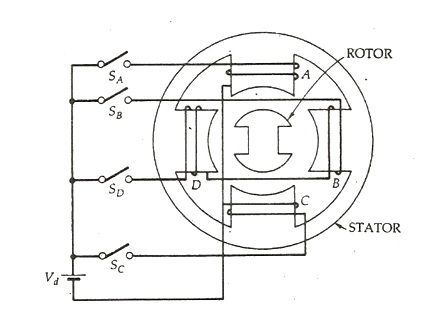
Les quatre phases A, B, C et D sont connectées à la source DC à l’aide d’un semi-conducteur, commutant SUNSBSC, et sD respectivement, comme indiqué dans la figure ci-dessus. Les enroulements de phase du stator sont sous tension dans la séquence A, B, C, D, A. Le rotor s’aligne sur l’axe de la phase A en tant qu’enroulement A est sous tension. Le rotor est stable dans cette position et ne peut pas se déplacer jusqu’à ce que la phase A soit dérangée.
Maintenant, la phase B est excitée et la phase A est déconnectée. Le rotor se déplace de 90 degrés dans le sens des aiguilles d’une montre pour s’aligner avec le champ d’air qui en résulte qui se trouve le long de l’axe de la phase B. La phase C de la même manière est sous tension, et la phase B est déconnectée, et le rotor se déplace à nouveau à 90 degrés pour s’aligner avec l’axe de la phase.
Ainsi, comme les phases sont excitées dans l’ordre en tant que A, B, C, D, A, le rotor se déplace à 90 degrés à chaque étape de transition dans le sens dans le sens des aiguilles d’une montre. Le rotor complète une révolution en 4 étapes. La direction de la rotation dépend de la séquence de commutation de la phase et ne dépend pas de la direction du courant qui traverse la phase. Ainsi, la direction peut être inversée en modifiant la séquence de phase comme a, d, c, b, A.
L’amplitude de l’angle de pas du moteur de réticence variable est donnée comme:
Où,
- α est l’angle de pas
- ms est le nombre de phases du stator
- Nr est le nombre de dents de rotor
L’angle d’étape est exprimé comme indiqué ci-dessous:
Où, nS est les pôles du stator
L’angle de pas peut être réduit de 90 degrés à 45 degrés dans le sens horaire en exciant la phase de la séquence A, A + B, B, B + C, C, C + D, D, D + A, A.
De même, si la séquence est inversée en tant que A, A + D, D, D + C, C, C + B, B, B + A, A, le rotor tourne à un angle de pas de 45 degrés dans le sens antihoraire.
Ici, (a + b) signifie que les enroulements de phase A et B sont tous deux sous tension. Le champ résultant est à mi-chemin entre les deux pôles. c’est-à-dire qu’il fait un angle de 45 degrés avec l’axe du poteau dans le sens des aiguilles d’une montre. Cette méthode de déplacement d’excitation d’une phase à une autre est connue sous le nom Microste. En utilisant un moteur pas à pas, des valeurs inférieures de l’angle de pas peuvent être obtenues avec un certain nombre de pôles sur le stator.
Considérez un moteur de réticence variable à une seule phase, (8/6 pôles), illustré à la figure ci-dessous:
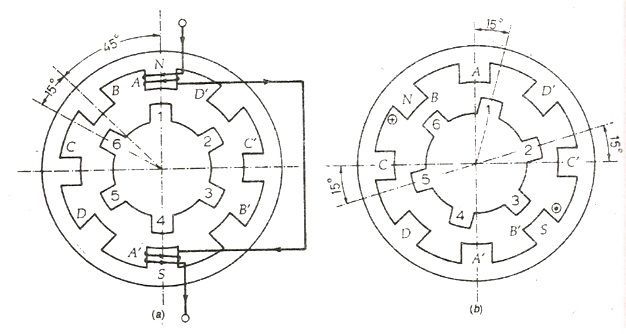
Les pôles opposés sont connectés en série formant 4 phases. Le rotor a 6 pôles. Ici, nous avons considéré uniquement la phase A pour rendre la connexion simple. Lorsque la bobine aa ‘est excitée, les dents du rotor 1 et 4 sont alignées le long de l’axe de l’enroulement de la phase A. Ainsi, le rotor occupe la position comme indiqué dans la figure ci-dessus (a).
Maintenant, la phase A est désactivée et l’enroulement de phase B est sous tension. Les dents du rotor 3 et 6 s’alignent le long de l’axe de la phase B. Le rotor déplace un pas de l’angle de phase de 15 degrés dans le sens des aiguilles d’une montre. De plus, la phase B est dérangée et le sinueux C est excité. Le rotor se déplace à nouveau de 15⁰ angle de phase.
La séquence A, B, C, D, A est suivie, et les quatre étapes de rotation sont terminées, et le rotor se déplace de 60 degrés dans le sens horaire. Pour une révolution complète du rotor, 24 étapes sont nécessaires. Ainsi, tout angle de pas souhaité peut être obtenu en choisissant différentes combinaisons du nombre de dents de rotor et de bobines excitantes du stator.