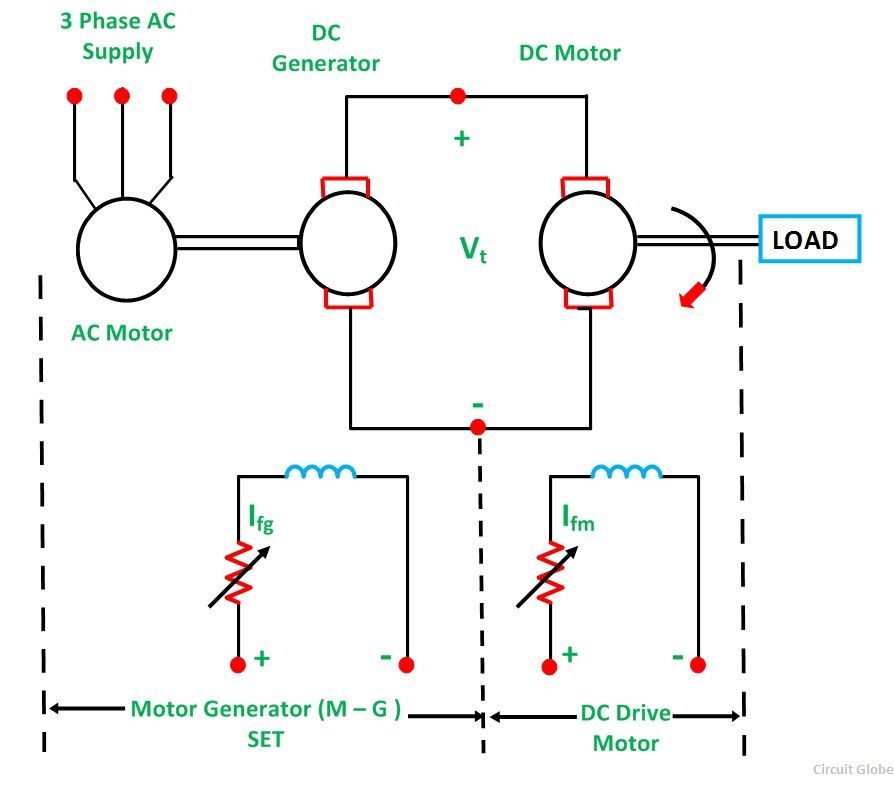
Méthode Ward Leonard du contrôle de vitesse est obtenu en faisant varier la tension appliquée à l’armature. Cette méthode a été introduite en 1891. Le diagramme de connexion de la méthode de la méthode de la vitesse de Ward Leonard d’un moteur de shunt CC est illustré dans la figure ci-dessous.
 Contenu
Contenu
- Couple et caractéristique de puissance
- Avantages des entraînements de Ward Leonard
- Inconvénients du système de Ward Leonard classique
- Applications des disques de Ward Leonard
- Contrôle à l’état solide ou Système statique de Ward Leonard
Dans le système ci-dessus, M est le moteur CC principal dont la vitesse doit être contrôlée, et G est un générateur CC excité séparément. Le générateur G est entraîné par un moteur de conduite triphasé qui peut être un moteur à induction ou un moteur synchrone.
La combinaison d’un moteur de conduite AC et du générateur DC est appelée Ensemble de générateur de moteur (MG).
La tension du générateur est modifiée en modifiant le courant de champ du générateur. Cette tension Lorsqu’elle est directement appliquée à l’armature du moteur à courant continu principal, la vitesse du moteur m change. Le courant de champ moteur IFM est maintenu constant de sorte que le flux de champ moteur ϕm reste également constant. Bien que la vitesse du moteur soit contrôlée, le courant d’armature du moteur est maintenu égal à sa valeur nominale.
Le courant de champ généré iFG est varié de telle sorte que la tension d’armature vt change de zéro à sa valeur nominale. La vitesse passera de zéro à la vitesse de base. Étant donné que le contrôle de vitesse est effectué avec le courant nominal IA et avec le flux de champ moteur constant, un couple constant est directement proportionnel au courant d’armature, et le flux de champ jusqu’à la vitesse nominale est obtenu. Le produit du couple et de la vitesse est connu sous le nom de puissance, et il est proportionnel à la vitesse.
Ainsi, avec l’augmentation de la puissance, la vitesse augmente automatiquement.
Le Couple et caractéristique de puissance est montré dans la figure ci-dessous:

Par conséquent, avec la méthode de commande de tension d’inmarrance, un couple constant et un entraînement variable sont obtenus à partir de la vitesse en dessous de la vitesse de base. La méthode de contrôle du flux de champ est utilisée lorsque la vitesse est supérieure à la vitesse de base. Dans ce mode de fonctionnement, le courant d’armature est maintenu constant à sa valeur nominale et la tension du générateur Vt est maintenu constant.
Le courant de champ moteur est diminué et, par conséquent, le flux de champ moteur diminue également. Cela signifie que le champ est affaibli pour obtenir une vitesse plus élevée. Depuis Vtjeun et eiun Reste constant, le couple électromagnétique est directement proportionnel au flux de champ ϕm Et le courant d’inhyme Iun.
Ainsi, si le flux de champ du moteur diminuait, le couple diminue.
Par conséquent, le couple diminue, à mesure que la vitesse augmente. Ainsi, dans le mode de contrôle du champ, la puissance constante et le couple variable sont obtenus pour les vitesses au-dessus de la vitesse de base. Lorsque le contrôle de la vitesse sur une large plage est nécessaire, une combinaison de contrôle de tension d’armature et de contrôle du flux de champs est utilisée.
Cette combinaison permet le rapport des vitesses maximales à vitesse minimale disponibles à 20 à 40. Pour un contrôle en boucle fermée, cette plage peut être étendue jusqu’à 200.
Le moteur de conduite peut être un moteur induction ou synchrone. Un moteur à induction fonctionne à un facteur de puissance en retard. Le moteur synchrone peut être utilisé à un facteur de puissance leader par surexcitation de son champ. La puissance réactive principale est générée par un moteur synchrone surexcité. Il compense la puissance réactive en retard prise par d’autres charges inductives. Ainsi, le facteur de puissance est amélioré.
Un moteur à induction à anneau de glissement est utilisé comme moteur P Prime lorsque la charge est lourde et intermittente. Un volant est monté sur l’arbre du moteur.
Ce schéma est connu sous le nom Ward Leonard-Ilgener schème. Il empêche de fortes fluctuations du courant d’approvisionnement.
Lorsque le moteur synchrone agit comme un moteur de conduite, les fluctuations ne peuvent pas être réduites en montant un volant sur son arbre, car le moteur synchrone fonctionne toujours à une vitesse constante.
Dans une autre forme de conduite de Ward Leonard, les moteurs de premier ordre non électriques peuvent également être utilisés pour conduire le générateur DC.
Par exemple – Dans la locomotive électrique DC, le générateur DC est entraîné par un moteur diesel ou une turbine à gaz et des entraînements de propulsion de navire. Dans ce système, le freinage régénératif n’est pas possible car l’énergie ne peut pas s’écouler dans le sens inverse dans le moteur principal.
Avantages des entraînements de Ward Leonard
Les principaux avantages du Ward Leonard Drive sont les suivants: –
- Le contrôle de vitesse lisse du moteur CC sur une large plage dans les deux sens est possible.
- Il a une capacité de freinage inhérente.
- Les volts-ampères réactifs en retard sont compensés en utilisant un moteur synchrone surexcité comme entraînement et donc, le facteur de puissance global s’améliore.
- Lorsque la charge est intermittente comme dans les rouleaux de roulement, le moteur d’entraînement est un moteur à induction avec un volant monté pour lisser la charge intermittent à une valeur basse.
Inconvénients du système de Ward Leonard classique
Le système Ward Leonard avec ensembles de générateurs de moteurs rotatifs présente des inconvénients suivants:
- Le coût initial du système est élevé car un ensemble de générateur de moteur est installé, de la même note que celle du moteur CC principal.
- Plus grande taille et poids.
- Nécessite une grande surface de plancher
- Fondation coûteuse
- La maintenance du système est fréquente.
- Pertes plus élevées.
- Plus faible efficacité.
- Le lecteur produit plus de bruit.
Applications des disques de Ward Leonard
Les disques de Ward Leonard sont utilisés où un contrôle de vitesse en douceur des moteurs CC sur une large plage dans les deux directions est nécessaire. Certains exemples sont les suivants:
- Rouleaux
- Ascenseurs
- Grues
- Papeterie
- Locomotives diesel-électriques
- Les palans de mine
Contrôle à l’état solide ou Système statique de Ward Leonard
Aujourd’hui Système statique de Ward Leonard est principalement utilisé. Dans ce système, l’ensemble du générateur de moteur rotatif (Mg) est remplacé par un convertisseur à l’état solide pour contrôler la vitesse du moteur à courant continu. Les redresseurs et les hachoirs contrôlés sont utilisés comme convertisseur.
Dans le cas d’une alimentation CA, des redresseurs contrôlés sont utilisés pour convertir la tension d’alimentation CA fixe en une tension d’alimentation CA variable. Dans le cas de l’alimentation en courant continu, les hélicoptères sont utilisés pour obtenir une tension CC variable à partir de la tension DC fixe.