Dans le système de boucle fermée, la sortie du système est une rétroaction à l’entrée. Le système de boucle fermée contrôle le lecteur électrique et le système est auto-ajusté. Des boucles de rétroaction dans un lecteur électrique peuvent être fournies pour satisfaire aux exigences suivantes.
- Amélioration de la vitesse du couple
- Pour améliorer la précision à l’état d’équilibre.
- Protection
Les principales parties du système en boucle fermée sont le contrôleur, le convertisseur, le limiteur de courant, le capteur de courant, etc. Le convertisseur convertit la fréquence variable en fréquence fixe et vice-versa. Le limiteur de courant limite le courant au-dessus de la valeur définie maximale. Les différents types de configuration de boucle fermée sont expliqués ci-dessous.
Contrôle de limite actuelle
Ce schéma est utilisé pour limiter le convertisseur et le courant du moteur en dessous d’une limite de sécurité pendant l’opération transitoire. Le système a une boucle de rétroaction de courant avec un circuit logique de seuil.
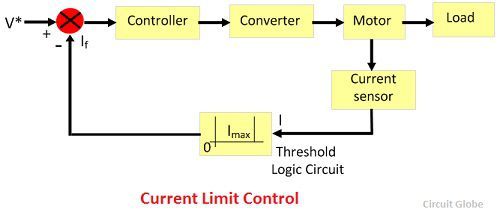 Le circuit logique protège le système d’un courant maximum. Si le courant est augmenté au-dessus de la valeur définie maximale due à une opération transitoire, le circuit de rétroaction devient actif et force le courant à rester en dessous de la valeur maximale. Lorsque le courant devient normal, la boucle de rétroaction reste inactive.
Le circuit logique protège le système d’un courant maximum. Si le courant est augmenté au-dessus de la valeur définie maximale due à une opération transitoire, le circuit de rétroaction devient actif et force le courant à rester en dessous de la valeur maximale. Lorsque le courant devient normal, la boucle de rétroaction reste inactive.
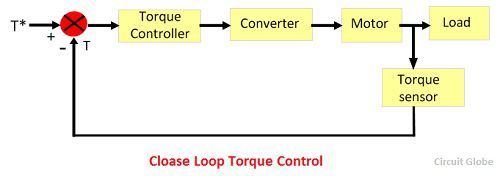
Contrôle du couple en boucle fermée
Ces types de boucle sont utilisés dans les véhicules à batterie, les rails et les trains électriques. Le couple de référence T * est réglé via l’accélérateur, et ce t * suit par le contrôleur de boucle et le moteur. La vitesse du lecteur est contrôlée en mettant une pression sur l’accélérateur.
 Contrôle de vitesse en boucle fermée
Contrôle de vitesse en boucle fermée
 Contrôle de vitesse en boucle fermée
Contrôle de vitesse en boucle ferméeLe diagramme de bloc du système de contrôle de la vitesse de boucle fermée est illustré dans la figure ci-dessous. Ce système a utilisé une boucle de commande intérieure dans une boucle de vitesse extérieure. La boucle de commande interne contrôle le courant du moteur et le couple du moteur sous une limite de sécurité.
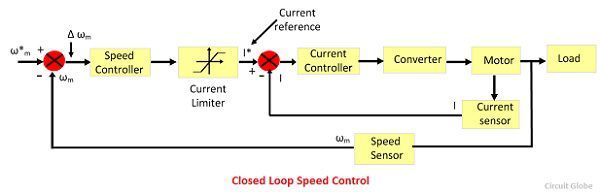 Considérez une vitesse de référence ω * m qui produit une erreur positive Δ ω * m. L’erreur de vitesse est opérée via un contrôleur de vitesse et appliquée à un limiteur de courant qui est surchargé même pour une petite erreur de vitesse. Le limiteur de courant a défini le courant pour la boucle de commande de courant interne. Ensuite, le lecteur accélère, et lorsque la vitesse du lecteur est égale à la vitesse souhaitée, le couple du moteur est égal au couple de charge. Ceci diminue la vitesse de référence et produit une erreur de vitesse négative.
Considérez une vitesse de référence ω * m qui produit une erreur positive Δ ω * m. L’erreur de vitesse est opérée via un contrôleur de vitesse et appliquée à un limiteur de courant qui est surchargé même pour une petite erreur de vitesse. Le limiteur de courant a défini le courant pour la boucle de commande de courant interne. Ensuite, le lecteur accélère, et lorsque la vitesse du lecteur est égale à la vitesse souhaitée, le couple du moteur est égal au couple de charge. Ceci diminue la vitesse de référence et produit une erreur de vitesse négative.
Lorsque le limiteur actuel sature, le lecteur devient désaccéléré dans un mode de freinage. Lorsque le limiteur de courant devient désaturé, le lecteur est transféré du freinage à la conduite.
Contrôle de vitesse en boucle fermée des lecteurs multi-moteurs
Dans ce type de lecteur, la charge est partagée entre les plusieurs moteurs. Dans ce système, chaque section a son propre moteur qui transporte la majeure partie de sa charge. La note du moteur est différente pour le type de charge différent, mais tout le moteur fonctionne à la même vitesse. Si l’exigence de couple de chaque moteur est satisfaite par son propre moteur de conduite, l’arbre de conduite ne doit transporter qu’un petit couple de synchronisation.
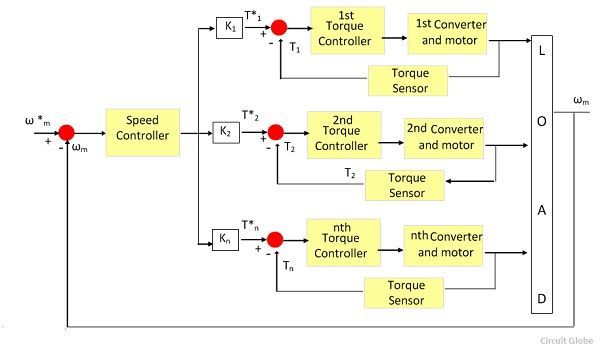 Dans une locomotive, en raison de la quantité différente d’usure, la roue de la locomotive tourne à la vitesse différente. Ainsi, la vitesse de conduite du véhicule varie également. Avec la vitesse, il est également essentiel que les couples soient partagés également entre les différents moteurs; Sinon, le moteur est entièrement chargé et un autre, est sous-charge. Ainsi, le couple de locomotif nominal sera inférieur à la somme de la cote de couple moteur individuel.
Dans une locomotive, en raison de la quantité différente d’usure, la roue de la locomotive tourne à la vitesse différente. Ainsi, la vitesse de conduite du véhicule varie également. Avec la vitesse, il est également essentiel que les couples soient partagés également entre les différents moteurs; Sinon, le moteur est entièrement chargé et un autre, est sous-charge. Ainsi, le couple de locomotif nominal sera inférieur à la somme de la cote de couple moteur individuel.