Le circuit équivalent d’un moteur à induction permet les caractéristiques de performance qui sont évaluées pour les conditions en régime permanent. Un moteur à induction est basé sur le principe d’induction des tensions et des courants. La tension et le courant sont induits dans le circuit du rotor à partir du circuit du stator pour l’opération. Le circuit équivalent d’un moteur à induction est similaire à celui du transformateur.
Contenu:
Modèle de circuit stator
Le modèle de circuit de stator d’un moteur à induction se compose d’une résistance à l’enroulement de la phase de stator r1réactance de fuite d’enroulement de phase stator x1 comme indiqué dans le diagramme du circuit ci-dessous:
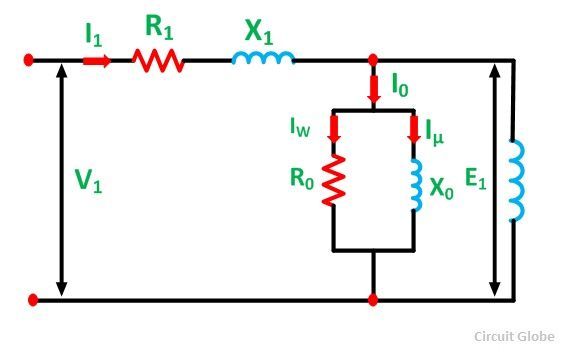 Le courant sans charge I0 est simulé par un réacteur inductif pur x0 Prendre le composant magnétisateur Iµ et une résistance non inductive r0 portant le courant de perte de base iΩ. Ainsi,
Le courant sans charge I0 est simulé par un réacteur inductif pur x0 Prendre le composant magnétisateur Iµ et une résistance non inductive r0 portant le courant de perte de base iΩ. Ainsi,![]()
Le courant de magnétisation total i0 est considérablement plus grand dans le cas du moteur d’induction par rapport à celui d’un transformateur. Cela est dû à la réticence plus élevée causée par l’espace d’air du moteur d’induction. Comme nous le savons, dans un transformateur, le courant à vide varie de 2 à 5% du courant nominal, tandis que dans un moteur à induction, le courant à vide est à propos 25 à 40% du courant nominal en fonction de la taille du moteur. La valeur de la réactance magnétisante x0 est également très petit dans un moteur à induction.
Modèle de circuit de rotor
Lorsqu’une alimentation triphasée est appliquée aux enroulements du stator, une tension est induite dans les enroulements du rotor de la machine. Plus sera le mouvement relatif du rotor et des champs magnétiques du stator, plus sera la tension du rotor qui en résultera. Le plus grand mouvement relatif se produit à la condition de l’arrêt. Cette condition est également connue sous le nom de rotor verrouillé ou de rotor bloqué. Si la tension de rotor induite à cette condition est e20 Ensuite, la tension induite à tout glissement est donnée par l’équation illustrée ci-dessous:![]()
La résistance au rotor est constante et est indépendante du glissement. La réactance du moteur à induction dépend de l’inductance du rotor et de la fréquence de la tension et du courant dans le rotor.
Si L2 est l’inductance du rotor, la réactance du rotor est donnée par l’équation illustrée ci-dessous:![]()
Mais, comme nous le savons,![]()
Donc,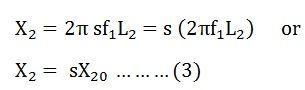
Où x20 est la réactance à l’arrêt du rotor.
Le circuit du rotor est illustré ci-dessous:
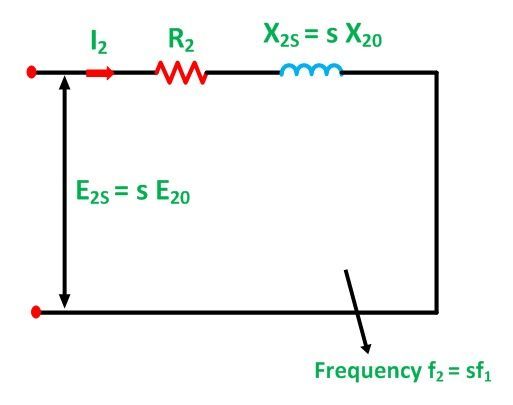
L’impédance du rotor est donnée par l’équation ci-dessous: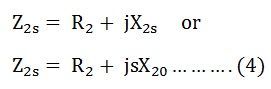
Le courant du rotor par phase est donné par l’équation ci-dessous:
Ici, je2 Le courant de fréquence de glissement est-il produit par une tension induite par la fréquence de glissement SE20 agissant dans le circuit du rotor ayant une impédance par phase de (r2 + JSX20).
Maintenant, divisant l’équation (5) par glissement, nous obtenons l’équation suivante:
Le r2 est une résistance constante et une réactance de fuite variable SX20. De même, le circuit du rotor illustré ci-dessous a une réactance de fuite constante x20 et une résistance variable R2/ s.
L’équation (6) ci-dessus explique le circuit secondaire d’un transformateur imaginaire, avec un rapport de tension constant et avec la même fréquence des deux côtés. Ce rotor stationnaire imaginaire porte le même courant que le rotor rotatif réel. Cela permet de transférer l’impédance du rotor secondaire du côté stator primaire.
Circuit équivalent approximatif d’un moteur à induction
Le circuit équivalent est encore simplifié en décalant les branches d’impédance de shunt r0 et x0 aux bornes d’entrée comme indiqué dans le diagramme du circuit ci-dessous:
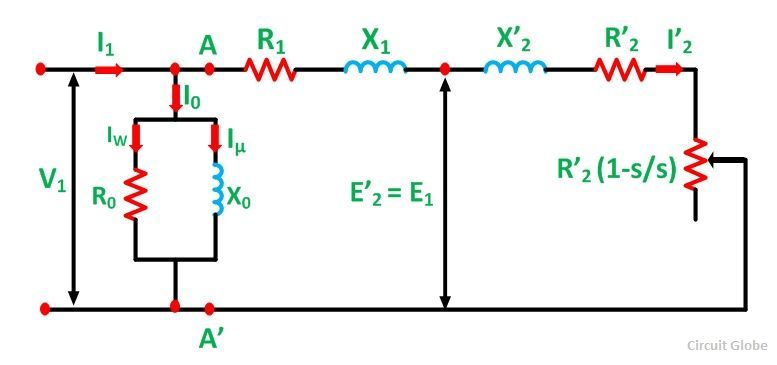 Le circuit approximatif est basé sur l’hypothèse que V1 = E1 = E ‘2. Dans le circuit ci-dessus, le seul composant qui dépend du glissement est la résistance. Toutes les autres quantités sont constantes. Les équations suivantes peuvent être écrites à n’importe quel slip donné S est la suivante:
Le circuit approximatif est basé sur l’hypothèse que V1 = E1 = E ‘2. Dans le circuit ci-dessus, le seul composant qui dépend du glissement est la résistance. Toutes les autres quantités sont constantes. Les équations suivantes peuvent être écrites à n’importe quel slip donné S est la suivante:
L’impédance au-delà aa ‘est donnée comme:
Mettre la valeur de zaa ‘de l’équation (7) dans l’équation (8) que nous obtenons,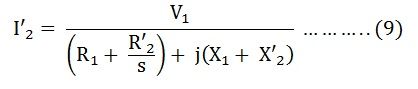
Donc,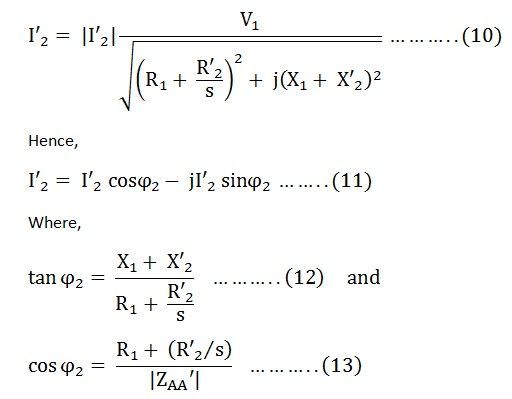
Current sans charge I0 est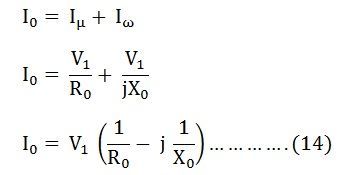
Le courant du stator total est donné par l’équation ci-dessous: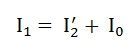
Les pertes de noyau total sont données par l’équation ci-dessous: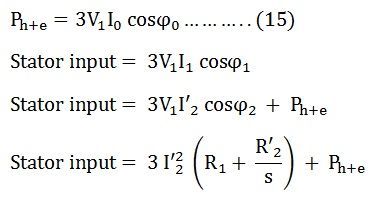
La puissance d’espace d’air par phase est donnée comme suit: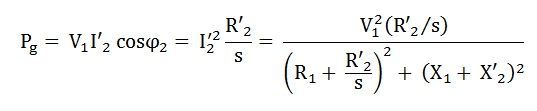 Le couple développé est donné par l’équation ci-dessous:
Le couple développé est donné par l’équation ci-dessous: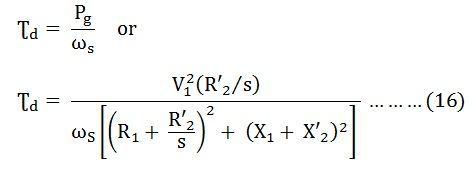
L’équation ci-dessus est l’équation de couple d’un moteur à induction. Le modèle de circuit équivalent approximatif est la norme pour tous les calculs de performances d’un moteur à induction.